
熱線電話
191-2198-6111

增量編碼器的工作原理如圖1所示。它由一個主代碼盤,一個鑒別盤,一個光學系統和一個光電轉換器組成。在圖中的主代碼盤(光電盤)的周圍刻有相同間距的徑向縫,以使透明區域和不透明區域均勻分布。鑒別盤與主代碼盤平行,并刻有兩組以1/4間距錯開的透明傳感縫隙a和b,因此A和B光電轉換器的輸出信號具有相位差。 90°。工作時,識別盤固定,主代碼盤隨旋轉軸旋轉,光源發出的光投射到主盤和識別盤上。當主碼盤的不透明區域與識別盤的透明狹縫完全匹配時,光被完全阻擋,光電轉換器的輸出電壓小。當主碼盤的透明區域與以下相匹配時,當識別盤的透明窄縫對準時,所有的光都通過,并且光電轉換器的輸出電壓。在標線片周期內,每次主碼輪旋轉時,光電轉換器都會輸出近似的正弦波電壓,并且光電轉換器A和B的輸出電壓之間的相位差為90°。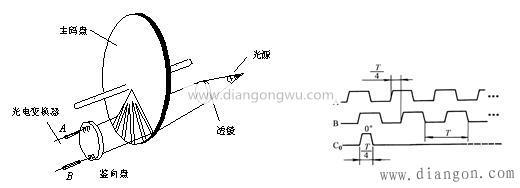
圖1增量編碼器的工作原理圖2光電編碼器的輸出波形光電編碼器的光源是常用的具有自聚光效果的發光二極管。當光電簾線輪與工作軸一起旋轉時,光線穿過光電簾線輪的狹縫和光闌板,形成閃光信號。感光元件將光信號轉換為電脈沖信號,并通過信號處理電路后,將脈沖信號輸出到數控系統,并且位移也可以直接用數字管顯示。光電編碼器的測量精度與代碼盤周圍的狹縫條數n有關,可識別的角度α為: α=360°/n(1)分辨率=1/n(2)例如:如果代碼盤邊緣的透光凹槽的數量為1,024,則可以解決的小角度為α=360°/1 024=0.352°。要確定碼盤的旋轉方向,您需要在膜片上設置兩個狹縫。該距離是(m +1/4)乘以碼盤兩個狹縫之間的距離,m是一個正整數。兩組相應的光敏元件,例如圖1中的A和B光敏元件,有時被稱為cos和sin元件。當感測對象旋轉時,同軸或相關的光電編碼器輸出兩個數字脈沖信號,A和B之間的相位差為90°。光電編碼器的輸出波形如圖2所示。為了獲得碼盤旋轉的絕對位置,您需要設置一個參考點,例如圖1中的“零標記槽”。每次碼盤旋轉時,對應于零標記槽的感光元件都會產生一個稱為“單圈脈沖”的脈沖。參見圖2中的C0脈沖。
圖3顯示了當編碼器來回旋轉時A和B信號的波形以及時序關系。當編碼器向前旋轉時,A信號的相位將B信號向前拉90°,如圖3所示。 (a)B信號的相位將A信號向前拉90°,如圖3(b)所示。輸出的脈沖A和B的數量與測得的角位移變化具有線性關系,因此可以通過對脈沖數進行計數來計算角位移。根據A和B之間的關系,可以準確地解調被測機器的旋轉方向和旋轉角度位移/速度,這被稱為脈沖方向和系數。脈沖的方向和計數可以通過軟件或硬件來實現。
圖3光電編碼器的正向和反向波形
公司地址 : 上海市嘉定區寶安公路2999弄
公司郵箱 : 19121986111@163.com
公司電話 :?021-6992-5088
