
熱線電話
191-2198-6111

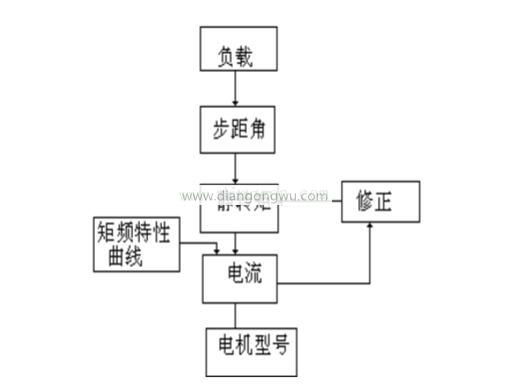
1.選擇步距角
電機的步距角取決于負載精度的要求。它將負載的小分辨率(等效值)轉換為電動機軸以及每個等效電動機必須行進的角度(包括減速度)。電機的步距角必須小于或等于該角度。當前市場上的步進電動機的步進角通常為0.36度/0.72度(5相電動機),0.9度/1.8度(兩相和四相電動機)和1.5度/3度(三相)電機)。 ), 等等。
2.靜態力矩的選擇
步進電機的動態轉矩很難一次確定,因此我們經常首先確定電機的靜態轉矩。靜態轉矩的選擇基于電動機的負載,該負載可分為兩種類型:慣性負載和摩擦負載。沒有單一的慣性載荷,也沒有單一的摩擦載荷。直接啟動(通常以低速啟動)時,必須同時考慮兩種類型的負載,在加速啟動時主要考慮慣性負載,而在以恒定速度運行時僅考慮摩擦負載。通常,靜轉矩應在摩擦負載的2-3倍之內,如果選擇靜轉矩,則可以確定電動機的機架和長度(幾何尺寸)
3.當前選擇
具有相同靜態轉矩的電動機由于電流參數不同而具有非常不同的工作特性。可以根據轉矩-頻率特性曲線判斷電動機的電流(請參見驅動電源和驅動電壓)。
總之,選擇電動機時應遵循以下步驟。
4.扭矩和功率轉換
傳入電機通常用于更大范圍的調速,并且具有可變功率。通常僅使用扭矩來測量扭矩。扭矩和功率的轉換如下。
P是功率單位(瓦特),Ω是每秒的角速度(弧度),n是每分鐘的速度,M是扭矩單位(牛頓計)P=2πfM/400(半步運行)每秒f脈沖(稱為PPS)。
公司地址 : 上海市嘉定區寶安公路2999弄
公司郵箱 : 19121986111@163.com
公司電話 :?021-6992-5088
