
熱線電話
191-2198-6111

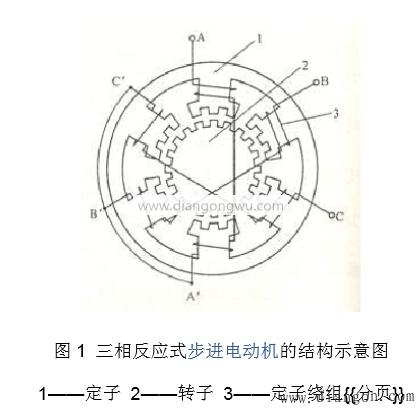
1——定子2——轉子3——定子繞組{{page}}
圖1是常見的三相無功步進電動機的示意性剖視圖。電動機的定子中有6個均勻分布的磁極,夾角為60o。每個極都覆蓋有一個線圈,并按照圖1連接形成A,B和C三相繞組。轉子中均勻分布有40個小齒。因此,每個齒的齒距為θE=360o/40=9°,并且在定子的每個極的極弧中有5個小齒,并且定子和轉子的齒距和齒寬相同。由于定子和轉子的小齒數分別為30和40,因此該比率是分數,導致所謂的齒數偏差。如圖1所示,當A相極的小齒與轉子的小齒對齊時,B相和C相的極齒與轉子的齒偏移一個。這是一個3度的音高。因此,B極和C極下的磁阻大于A極下的磁阻。當B相通電時,B相繞組會產生定子磁場,并且磁場線會穿過B相磁極,并嘗試以小的阻力沿路徑閉合,從而使轉子隨動旋轉。磁極B的齒與轉子的齒對齊,反作用轉矩(磁阻轉矩)直到轉子旋轉3o為止,磁極A和C下的齒偏離轉子齒。間距的1/3。然后停止B相繞組的通電,并轉換為C相繞組。同樣,轉子在反作用轉矩的作用下順時針旋轉3o。同樣,當三相繞組按A→B→C→A的順序通電時,轉子順時針旋轉,每個傳導脈沖以規則的步長旋轉3o。當改變通電順序并按A→C→B→A的順序循環通電時,轉子將逆時針旋轉,同時每個通電脈沖有規律地旋轉3o。 之所以稱為單3位工作模式,是因為一次只給單相繞組通電,然后根據這三種通電狀態周期性地通電。在單次3位操作中,步距角θb為30°。三相步進電動機還具有兩種通電模式。即,按照AB→BC→CA→AB的順序進行通電,即A→AB的單雙6位運算。 →B→BC→C→CA→A是定期供電的方法。以6拍運行可將步距角減半。響應式步進電機的步距角可以如下計算。
θb=360o/NEr(1)
公式中的Er——轉子齒數
N——跑步節拍,N=km,m是步進電機的繞組相數,k=1或2。
然而,動態性能差,效率低,發熱量大,并且難以確保可靠性。
公司地址 : 上海市嘉定區寶安公路2999弄
公司郵箱 : 19121986111@163.com
公司電話 :?021-6992-5088
